In previous post, I showed a simple programming example of using a character LCD with the STM32F103R6 ARM micro-controller using an 8-bit data bus. As it's already known, this LCD module is able to accept data from the micro-controller using 4-bit data bus. However the whole data ore command is still 8-bit wide. The MCU need to send data twice. The higher nibble needed to send and latch into the LCD module first. Then the lower nibble will be sent and latched into the LCD module.
 |
| Program Simulation |
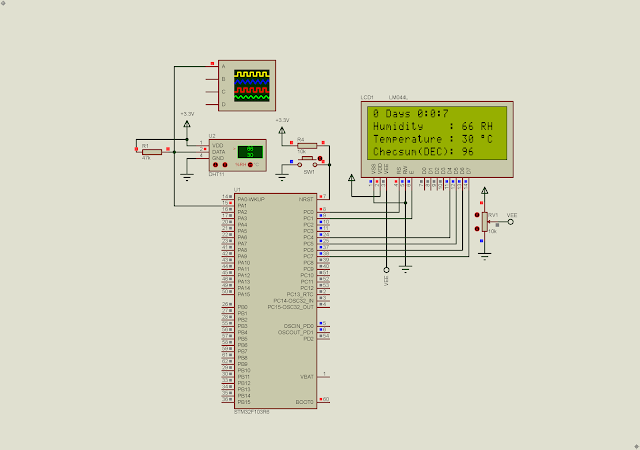
In this programming example, I will use PORTC of the STM32F103R6 to interface with the HD44780 LCD module. Where,
- PC0 connects to LCD Register Select (RS)
- LCD Read/Write (R/W) connects to GND as we only need to write data or command to the LCD module
- PC1 connects to LCD Enable (E) pin. It latches data into the LCD module whenever a High to Low transition occurs.
- PC4...PC7 connect to LCD data bus D4...D7.
Anyway the programmer should select other port or pin number of this micro-controller.
 |
| Device Configuration Tool |
Device Configuration Tool could generates the source code for target controller without writing code.
I use a 20x4 character LCD. If you prefer a 16x2 LCD you need to modify its display RAM address in the program. Click here to download its source file.