In previous post, I show an example of driving a HD44780-based character LCD using 4-bit data mode. Driving this LCD module is quite easy. We can use other driving chip to make the communication interface between the micro-controller and this LCD module simpler. For example the programmer can add a I2C I/O expanding chip (PCF8574), or an SPI I/O expanding chip (SN74HC595N or 74HC164).
|
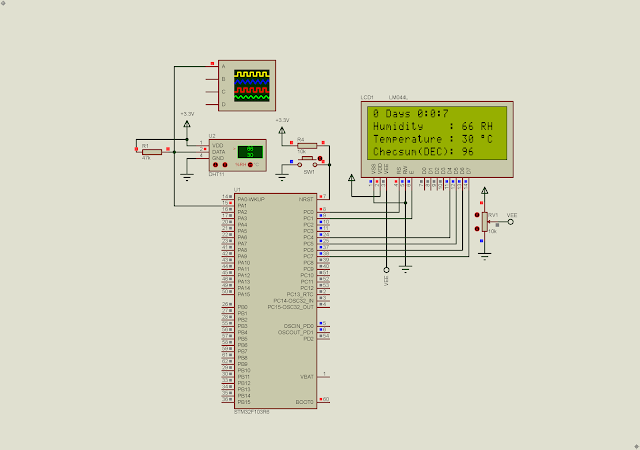
Simulating Program Using Proteus VSM 8.15 |

In this example, I use an SN74HC595N serial-in-parallel-out shift registers to drive a character LCD. This chip uses the Serial Peripheral Interface (SPI). The LCD module is a 20x4 HD44780-based LCD controller.
|
Device Configuration Tool For SPI1 Communication Module |

We need to configure the SPI1 communication module of this micro-controller as above. I choose the slave select or the Hardware NSS output signal using hardware. So we don't need to write the slave select signal in program. This signal is automatic activate after the SPI data has transmitted.
Its source code is very simple. It's similar to the previous example. We just process the 4-bit LCD controlling. Then we will need to put those LCD controlling data into the SPI1 data buffer before it's sent over the SPI communication interface.
If we want to use the 74HC164 serial-in-parallel-out shift registers we will need to drive the LCD Enable pin directly from the micro-controller. Click here to download its source file.



No comments:
Post a Comment