In this example I use the STM32F103R6 and its SPI1 to drive a single common cathode 7-Segment display using three wires - Serial Data, Serial Clock, and Enable pin. However the SPI communication could be create via user program. But in the STM32CubeIDE we can configure the hardware SPI easily using its code configuration wizard. After the code is created, the program just call a few function to transfer/receive the data.
 |
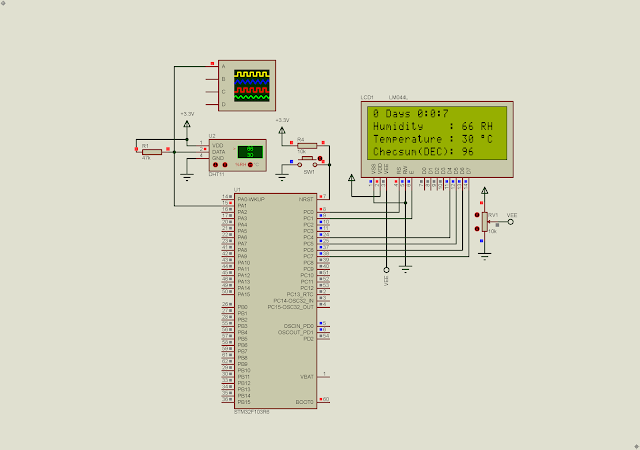
| Simulating Program In Proteus |
I place a push button connects to PA15. Whenever it's press, the controller sends the display data data between 0 and 9.
|
SPI1 and Pin Configuration |

I select my own Enable pin at PA8. It latch the data into the register at the high to low transition. I have a similar post that just use a bar-graph LED.
Click here to download its source file.
For other similar posts please check,
- Getting Started With STM32F103C8T6 Module with STM32CubeIDE
- STM32F103C8T6 Blue Pill SysTick and Multiplexing Display Example
- STM32F103C8T6 Blue Pill Switch And Multiplexing Display Interface Using SysTick
- STM32F103C8T6 Blue Pill SysTick LED Blinking
- STM32F103R6 Common Anode Seven Segments Display Example
- STM32F103R6 Common Anode Seven Segments Display And Switch Interfacing
- STM32F103R6 Simple 2-Digit Multiplexing Display And Switch Example
- STM32F103R6 SysTick And Digital Clock Example
- STM32F103R6 SysTick Two-Digit Multiplexing Display and Push Button
- LED Blinking With STM32F103R6 Using SysTick
- STM32F103R6 SPI Interfaces To SN74HC595N Shift Registers
- STM32F103R6 GPIO Interfaces To A Character LCD In 8-Bit Mode
- STM32F103R6 SPI Interfaces To A Single Seven-Segment Display
- STM32F103R6 Interfaces To A Character LCD Using MikroC For ARM



No comments:
Post a Comment